
 By Umit Ozguner
By Umit Ozguner
Professor Emeritus
Ohio State University
At Ohio State University’s Center for Automotive Research, the preeminent research center in sustainable and safe mobility in the United States and an interdisciplinary research center in The Ohio State University’s College of Engineering, we have been involved in different aspects of dealing with vulnerable road users for many years.
There seem to be two different classes of settings.
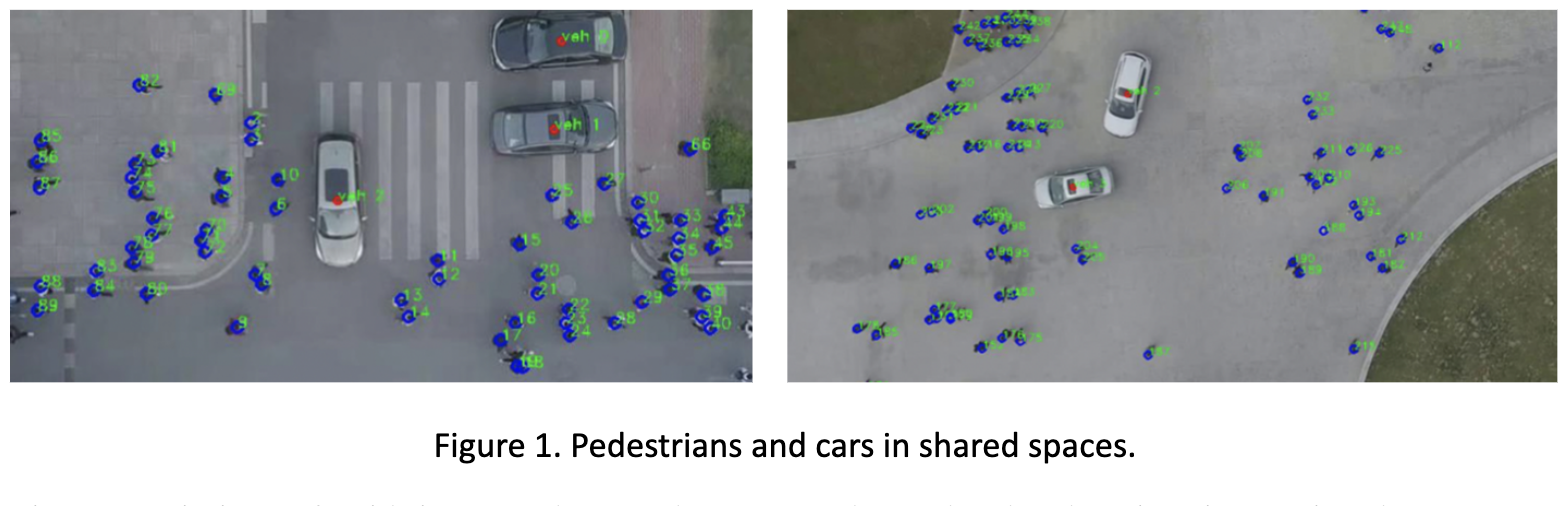
The first is when the sheer number of VRUs (pedestrians and cyclists, and now possibly small delivery robots) can claim equal rights on the common shared space with cars, buses, etc. One can think of the morning rush hour in cities, where the dominant mode of transportation are the cyclists who will fill all the gaps between the cars like a liquid flow (say in Beijing). Or one can think of the pedestrian crowds exiting Ohio Stadium and flowing onto the street after a Buckeye win in Columbus. In these, the group of VRUs will jointly move towards their destination and may not change their trajectories much due to the slowly approaching car.
The second class of vehicle-VRU interaction we are investigating is related to pedestrians or cyclists whose entry onto the roadway is not known. They may either be occluded due to other objects blocking the drivers or the automated vehicle camera’s field of view (see Figure 2), or they may be on the roadside or pedestrian walkway and their crossing intent unknown.
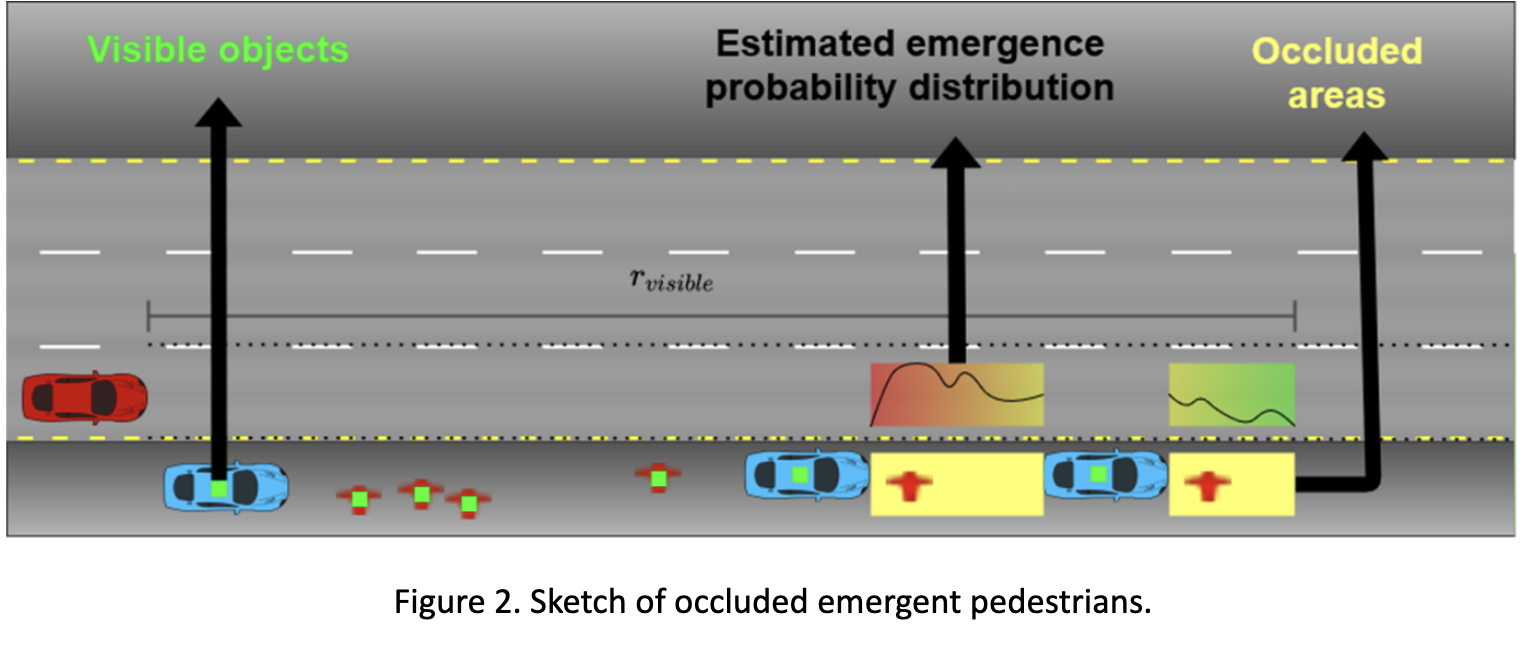
As far as the occluded, emergent VRU goes, we have to either supply a warning signal to the coming car, possibly with new sensing technology, or rely on whatever we know about the probability of somebody emerging. If there is a field where people tend to play soccer, or there is a school by the side of the road, you may want to be extra careful. If the time of day gives you more insight, use it! This is going to be important when establishing the speed profile of the automated car passing by. There are a number of technologies that can detect the emergent VRU. They can be either a roadside camera, a beacon or directly from a pedestrian wireless “I am here” signal.
The situation is truly simplified in Figure 2. In general, the road may be curved, we may be close to an intersection and there may be other vehicles on multiple lanes which will make the problem of mathematical modeling and estimation of parameters quite difficult. A crossing pedestrian or cyclist may do unforeseen motions when surprised or scared.
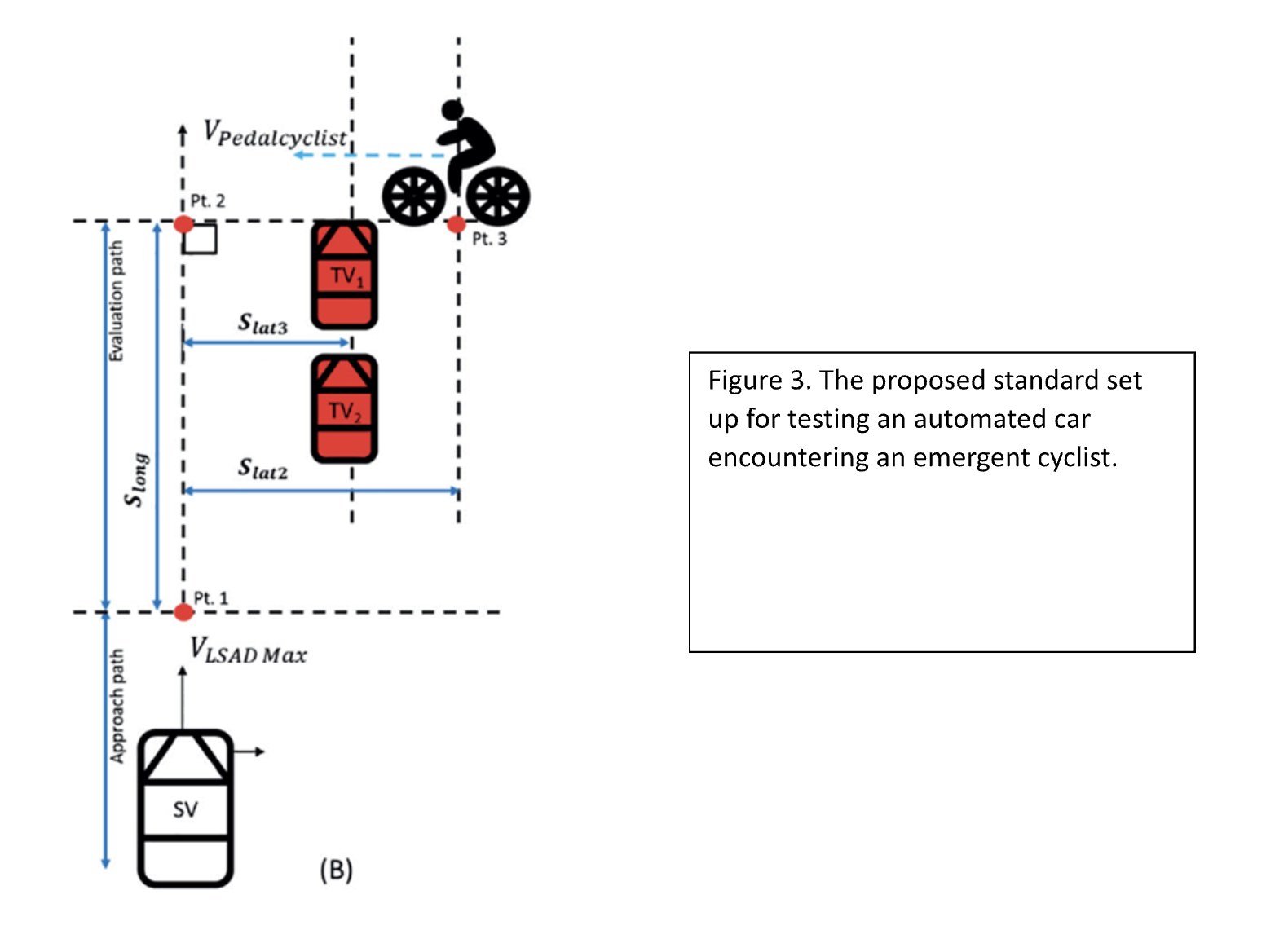
In analyzing control strategies for an automated car, we need to consider risks, perform simulation studies and tests. Fortunately, certain standards and associated tests have started appearing. Figure 3 shows a recently developed set up (as part of ISO 22737) for testing an automated car’s safety with an emergent cyclist.
Back to The Lane
Signup For The Bike Lane Newsletter